



中國消費(fèi)者報(bào)報(bào)道(記者吳博峰)與行人發(fā)生碰撞、被路上的垃圾袋“逼?!?、在綠燈狀態(tài)下停滯不前、轉(zhuǎn)彎時(shí)卡頓不動(dòng)……這幾天,,有關(guān)蘿卜快跑的相關(guān)話題屢登各社交平臺(tái)熱搜榜,。無人駕駛出租車固然火了,但其行駛過程中出現(xiàn)的種種“小插曲”,,反映了智能駕駛技術(shù)在實(shí)際應(yīng)用中的挑戰(zhàn),,也引發(fā)了公眾的熱議,目前輔助駕駛功能究竟靠譜嗎,?
公眾關(guān)切的背后,,折射出汽車智能化正快速融入大眾生活,成為消費(fèi)者購車決策中的重要考量因素,。那么,,普通消費(fèi)者又該如何判斷一輛車智能化水平的高低呢?此時(shí),,專業(yè)權(quán)威的第三方評(píng)價(jià)顯得尤為重要,。7月1日起,由中汽測(cè)評(píng)發(fā)布的中國智能網(wǎng)聯(lián)汽車技術(shù)規(guī)程(C—ICAP)2024版正式實(shí)施,,根據(jù)行業(yè)技術(shù)發(fā)展再一次更新了測(cè)評(píng)場(chǎng)景,,可對(duì)車輛輔助駕駛性能進(jìn)行獨(dú)立、公正,、專業(yè)的評(píng)價(jià),。
汽車在日常行車過程中,難以避免會(huì)遇到行人穿行,、道路施工、交通事故等突發(fā)場(chǎng)景,,緊急避險(xiǎn)能力著重考察車輛在突發(fā)情況下的主動(dòng)安全能力,。對(duì)此,2024版C-ICAP基礎(chǔ)行車輔助測(cè)評(píng)細(xì)則中新增了目標(biāo)位縱向移動(dòng)的場(chǎng)景。
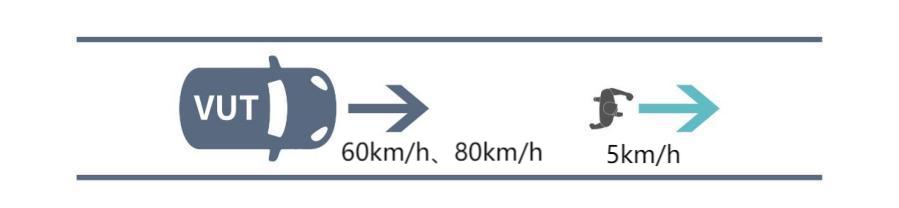
目標(biāo)物縱向移動(dòng)測(cè)試場(chǎng)景,。資料圖片
據(jù)介紹,,在基礎(chǔ)行車輔助測(cè)評(píng)細(xì)則中,目標(biāo)物縱向移動(dòng)測(cè)試模擬行人在機(jī)動(dòng)車道行走的危險(xiǎn)情況,,測(cè)試車輛以60km/h,、80km/h的速度快速行駛,對(duì)車輛行車輔助功能的安全性進(jìn)行較高難度的測(cè)試,。
輔助駕駛系統(tǒng)雖然能夠提供一定程度的自動(dòng)化支持,,但駕駛員仍然是功能操作和責(zé)任主體。這意味著,,即使在輔助駕駛模式下,,駕駛員也需要保持對(duì)車輛的監(jiān)控,隨時(shí)準(zhǔn)備接管車輛的控制權(quán),,如在泊車場(chǎng)景下,,自動(dòng)泊車系統(tǒng)可以讓停車變得更便利,但有其自身的局限性,,在靠路邊停車過程中,,經(jīng)常會(huì)遇到后方出現(xiàn)自行車等情況,因此,,駕駛員在泊車仍要注意觀察,。
為模擬泊車過程中后方遇到自行車或行人場(chǎng)景,2024版C-ICAP基礎(chǔ)泊車輔助測(cè)評(píng)細(xì)則中引入了平行車位-車位線車位泊入測(cè)試場(chǎng)景,。
據(jù)了解,,在基礎(chǔ)泊車輔助測(cè)評(píng)細(xì)則中,該場(chǎng)景由三個(gè)車位線車位,、障礙車輛和自行車構(gòu)成,。一障礙車輛靜止在車位內(nèi),自行車放置在目標(biāo)車位相鄰車位旁,。

路邊停車遇自行車,。資料圖片
測(cè)試過程中,當(dāng)試驗(yàn)車輛搜索到目標(biāo)車位并靜止后,,測(cè)試工程師選擇目標(biāo)停車位啟動(dòng)泊車輔助系統(tǒng)后,,自行車沿預(yù)定路線行駛,剎停于目標(biāo)車位中線處,,干擾試驗(yàn)車輛的泊入過程,。
在部分地下停車場(chǎng)中,停車位與出入口相鄰,,導(dǎo)致泊車過程中可能會(huì)遇到行人橫穿,。為模擬該場(chǎng)景,,2024版C—ICAP規(guī)程基礎(chǔ)泊車輔助測(cè)評(píng)細(xì)則中引入了垂直車位—車位線車位泊入測(cè)試場(chǎng)景。
測(cè)試過程中,,在試驗(yàn)車輛最后一次入庫過程中,,當(dāng)車尾越過車位線前沿時(shí),行人目標(biāo)物出發(fā)并穿過目標(biāo)車位,,考驗(yàn)車輛的避障能力與安全性,。
隨著智能網(wǎng)聯(lián)技術(shù)的快速發(fā)展,智能網(wǎng)聯(lián)汽車的市場(chǎng)占有率逐步走高,,輔助駕駛功能的裝車率屢創(chuàng)新高,,科學(xué)客觀公正的測(cè)試及評(píng)價(jià)車輛輔助駕駛性能表現(xiàn),已成為消費(fèi)者購車決策中的重要參考指標(biāo),。業(yè)界期待2024版C—ICAP的落地實(shí)施,,中汽測(cè)評(píng)將以汽車測(cè)評(píng)的專業(yè)身份,從第三方測(cè)評(píng)視角,,為消費(fèi)者提供更多車輛智能網(wǎng)聯(lián)性能表現(xiàn),,同時(shí)推動(dòng)汽車產(chǎn)品優(yōu)化智能表現(xiàn),不斷改善車輛智駕體驗(yàn),。
-
 規(guī)范智能網(wǎng)聯(lián)汽車管理 推動(dòng)產(chǎn)業(yè)高質(zhì)量發(fā)展2025-03-10
規(guī)范智能網(wǎng)聯(lián)汽車管理 推動(dòng)產(chǎn)業(yè)高質(zhì)量發(fā)展2025-03-10 -
年產(chǎn)突破千萬輛的新能源車 整車安全性功能同質(zhì)化等問題仍待解決2024-12-12
-
新能源汽車生產(chǎn)一致性仍不如人意 遵守國標(biāo)是車企應(yīng)盡職責(zé)2024-12-09
-
中國保險(xiǎn)汽車安全指數(shù)新能源汽車專項(xiàng)測(cè)評(píng)規(guī)程審定會(huì)在京召開2024-10-31
-
你的“小電驢” 將迎新升級(jí)——電動(dòng)自行車國標(biāo)修訂以安全為第一...2024-10-10






官方微信公眾號(hào)

官方微博





